




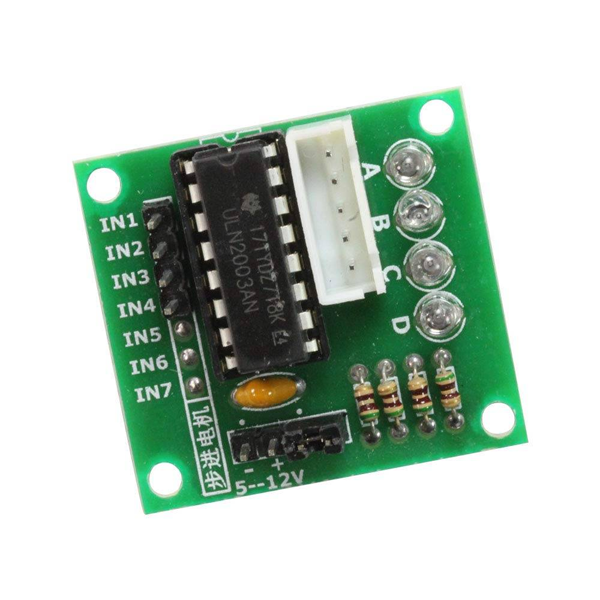
El módulo ULN2003 es un driver especialmente diseñado para manejar el motor a pasos 28BYJ-48 (unipolar). Adicionalmente puede ser usado para manejar Relays, motores DC o cualquier carga DC de bajo consumo de corriente. Internamente posee un arreglo de 7 transistores NPN Darlington con diodos de protección para cargas inductivas. Cada transistor o canal es capaz de manejar una carga de hasta 500mA, se pueden utilizar canales en paralelo y asi aumentar la capacidad de corriente. Al utilizar el modulo ULN2003 con el motor a pasos 28BYJ-48 podemos controlar el sentido de giro y la velocidad del motor mediante señales TTL, estas señales se pueden obtener de un microcontrolador como Arduino, Pic o Raspberry Pi.
El PCB controlador de motor paso a paso ULN2003 proporciona una interfaz de accionamiento directo entre su microcontrolador y motor paso a paso. El PCB proporciona 4 entradas para la conexión a su microcontrolador, fuente de alimentación conexión para el voltaje del motor paso a paso, y puente ON / OFF, un conector de motor paso a paso de conexión directa y 4 LED para indicar el estado de avance.
El motor avanza cuando una combinación específica de entradas se acciona desde el microcontrolador. Esto es solo un pulso de potencia, lo suficiente para que el motor arranque. Este controlador utiliza un protocolo muy simple. Aplicar una señal a una entrada el pin hace que se envíe energía al motor por un cable correspondiente.
Conexión de motor:
El Arduino debe estar conectado a la placa del controlador ULN2003 como se muestra a continuación:
- 5V + conectar a + 5V
- 5V- conectar a 0V (tierra)
- IN1: al pin de entrada digital Arduino 8
- IN2: al pin de entrada digital Arduino 9
- IN3: al pin de entrada digital Arduino 10
- IN4: al pin de entrada digital Arduino 11
Conducción del motor:
Debe conducir el motor habilitando las clavijas en un orden de 8 fases
- Solo unidad IN4
- Conducir IN4 y IN3
- Solo conducir IN3
- Conducir IN3 y IN2
Especificaciones:
- Tensión nominal: 5V a 12V DC
- Número de fase: 4
- Relación de variación de velocidad: 1/64
- Ángulo de paso: 5.625 ° / 64
- Frecuencia: 100Hz
- Resistencia DC: 50Ω ± 7% (25)
- Frecuencia de In-tracción Inactiva:> 600Hz
- Frecuencia de fuera de tracción inactiva:> 1000Hz
- Torque en la tracción:> 34.3mN.m (120Hz)
- Par de auto-posicionamiento:> 34.3mN.m
- Par de fricción: 600-1200 gf.cm
- Tire del par: 300 gf.cm
- Grado de aislamiento A











{kind=link}