




Kit para Armar de Carro Seguidor de Línea
Q225.00
En Existencia
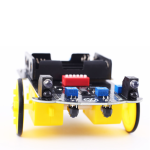
Es un coche de control inteligente que mide la distancia por sensor infrarrojo para lograr la evitación de obstáculos, el seguimiento y las siguientes funciones. Es adecuado para la enseñanza experimental; Experimento científico; Operación práctica.
Características:
- Función de rastreo de soporte
- Apoyar la función de evitación de obstáculos
- Admite la siguiente función
- Ajuste de detección automática
- Admite seleccionar el modo de trabajo
Parámetros:
- Voltaje de funcionamiento: DC 4,5 V
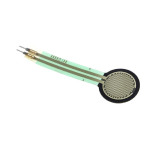
- Siguiente Sensor:TCRT5000
- Seguimiento: sensor infrarrojo
- Rango de temperatura de trabajo:-20 ℃ ~ 85 ℃
- Rango de humedad de trabajo: 0%-95% RH
- Tamaño instalado: 120*88*53mm
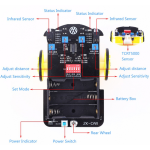
Introducción del potenciómetro:
- Potenciómetro R5: se utiliza para ajustar la sensibilidad del sensor TCRT5000 izquierdo para la función de seguimiento. La rotación en el sentido de las agujas del reloj aumenta la sensibilidad.
- Potenciómetro R8: se utiliza para ajustar la sensibilidad del sensor TCRT5000 derecho para la función de seguimiento. La rotación en el sentido de las agujas del reloj aumenta la sensibilidad.
- Potenciómetro R1: se utiliza para ajustar la sensibilidad del sensor infrarrojo izquierdo para la función de seguimiento y evitación de obstáculos. La rotación en el sentido de las agujas del reloj aumenta la sensibilidad y aumenta la distancia de detección.
- Potenciómetro R2: se utiliza para ajustar la sensibilidad del sensor infrarrojo derecho para la función de seguimiento y evitación de obstáculos. La rotación en el sentido de las agujas del reloj aumenta la sensibilidad y aumenta la distancia de detección.
- Interruptor SW1: Seleccione el modo de trabajo. Los interruptores primero y segundo se utilizan para seleccionar la función de seguimiento si ambos están encendidos. Los interruptores 3 y 4 se utilizan para seleccionar la siguiente función si ambos están encendidos. Los interruptores 5 y 6 se utilizan para seleccionar la función de evitación de obstáculos si ambos se encienden.
- Botón de encendido/apagado: Indicador de encendido de trabajo.
Función de seguimiento:
- Encienda los interruptores primero y segundo al mismo tiempo.
- Principio: el sensor de seguimiento es un par de sensores tcrt5000. El fondo negro absorbe la luz y el fondo blanco refleja la luz. Así que el receptor TCRT5000 no puede recibir la señal del transmisor TCRT5000 si la señal se inicia en un fondo negro. El receptor TCRT5000 puede recibir señal del transmisor TCRT5000 si La señal se lanza al fondo blanco. Nuestra pista es negra y el Fondo es blanco. Así que la pista puede absorber la señal del transmisor TCRT5000 para que el receptor no pueda recibir la señal. Eso significa que el coche se desvía de la pista original. Entonces el coche automáticamente Ajusta la dirección y vuelve a la pista normal. El coche inteligente girará a la derecha derecho si el sensor detecta la pista negra (este sensor no puede recibir señal, lo que significa una pista que detecta negra). El coche girará a la izquierda si el sensor izquierdo detecta el negro Pista.
- Ajustar la sensibilidad: colocar el coche sobre un fondo blanco. Ajuste el potenciómetro R5 y R8 para asegurarse de que el coche siga adelante con normalidad. El indicador LED se encenderá automáticamente. Coloque el carro en el centro de la pista negra y encienda la potencia de trabajo. El coche puede moverse a lo largo del seguimiento negro.
Función siguiente:
- Encienda los interruptores 3. ª y 4. ª vez.
- Principio: el sensor de seguimiento es un par de sensores infrarrojos. Cambie la dirección de movimiento del automóvil inteligente detectando si hay un obstáculo delante del sensor. El transmisor infrarrojo envía una señal. La señal será recibida por el receptor de infrarrojos si hay obstáculos en la parte delantera y señal reflejada. Entonces el El coche inteligente se moverá a obstáculos. Parada de coche inteligente que se mueve si no hay obstáculos en la parte delantera. Gire a la derecha (la parada del motor derecho y el motor izquierdo siguen adelante) si hay obstáculos a la derecha. Gire a la izquierda (parada del motor izquierdo y motor derecho Adelante) si hay obstáculos en Izquierda.
- Ajuste la distancia de detección: Ajuste el potenciómetro R1 y R2 para cambiar la distancia de detección. La rotación en el sentido de las agujas del reloj aumenta la sensibilidad.
- Los siguientes movimientos de la función y la función de evitación de obstáculos son todo lo contrario. La siguiente función se mueve a obstáculos para que necesiten movimientos de obstáculos. La función de evitación de obstáculos evita que se mueva a obstáculos para que necesiten fijar obstáculos.
Función de evitación de obstáculos:
- Encienda los interruptores 5 ° y 6 ° al mismo tiempo.
- Principio: el sensor de seguimiento es un par de sensores infrarrojos. Cambie la dirección de movimiento del automóvil inteligente detectando si hay un obstáculo delante del sensor. El transmisor infrarrojo envía una señal. La señal será recibida por el receptor de infrarrojos si hay obstáculos en la parte delantera y señal reflejada. Entonces el inteligente El coche evitará moverse a los obstáculos. El coche inteligente sigue adelante si no hay obstáculos en la parte delantera. Gire a la derecha (la parada del motor derecho y el motor izquierdo siguen adelante) si hay obstáculos a la izquierda. Gire a la izquierda (parada del motor izquierdo y motor derecho Adelante) si hay obstáculos a la derecha.
- Ajuste la distancia de detección: Ajuste el potenciómetro R1 y R2 para cambiar la distancia de detección. La rotación en el sentido de las agujas del reloj aumenta la sensibilidad.
- Los siguientes movimientos de la función y la función de evitación de obstáculos son todo lo contrario. La siguiente función se mueve a obstáculos para que necesiten movimientos de obstáculos. La función de evitación de obstáculos evita que se mueva a obstáculos para que necesiten fijar obstáculos.
Pasos de instalación/uso:
- Confirme que no faltan accesorios.
- Para diferenciar el motor izquierdo y derecho, consulte la imagen de descripción.
- Instale la rueda para dos motores.
- Pegue 2 piezas de adhesivo de doble cara en el área blanca de PCB que marcan R y L.
- Pegue 2 uds. De motor en la cinta de doble cara. Preste atención para distinguir entre motor izquierdo y derecho.
- Instale el pilar fijo como rueda trasera.
- Instale 3 uds. De pilas AA en la caja de las pilas. (¡el paquete no incluye pilas!)
- Seleccione la función de seguimiento encendiendo los interruptores 1 ° y 2 ° al mismo tiempo para ejecutar el coche inteligente. Ajuste el potenciómetro R5 y R8 para asegurarse de que el coche siga adelante con normalidad.
- Seleccione la siguiente función encendiendo los interruptores 3. ª y 4. ª vez para ejecutar el coche inteligente. Ajuste el potenciómetro R1 y R2 para cambiar la distancia de detección.
- Seleccione la función de evitación de obstáculos encendiendo los interruptores 5 ° y 6 ° al mismo tiempo para ejecutar el automóvil inteligente. Ajuste el potenciómetro R1 y R2 para cambiar la distancia de detección.
Nota:
- Utiliza un sensor infrarrojo y, por lo tanto, no se puede utilizar bajo la luz solar. Se recomienda utilizarlo en interiores.
- Viene sin batería AA. El usuario debe prepararse con anticipación.
- Solo se puede seleccionar un modo de trabajo al mismo tiempo.
- Manual de uso (en chino).
Nota: Respecto al manual en chino. Se informa que el armado es bastante intuitivo y se puede seguir paso a a paso viendo las fotos incluidas, sin casi necesidad de traducción. De toda formas si lo desea puede usar el traductor del teléfono celular y utilizar la opción de traducción de chino a ingles mediante la camara (se enfoca con la camara los textos en chino y los muestra en ingles).
Aplicación:
- Enseñanza Experimental
- Experimento científico
- Funcionamiento Práctico
- Competencia tecnológica
- Desarrollar el interés
Paquete:
- 1pc ZK-CAR PCB de coche inteligente con componentes instalados
- 2 piezas de Motor TT
- 2 uds. De cinta de doble cara
- 1 tornillo M4.5 + 29mm
- 1 tuerca M4.5
- 1pc M4.5 tapa de rosca
- 2 piezas de tornillo autorroscante
- 1 destornillador

ENVÍO POR CARGO EXPRESO
📦 Enviamos a todo el país por medio de Cargo Expreso, para que recibas tus productos de forma rápida y segura.
Puedes pagar el total de tu compra junto con el envío al momento de recibir tu pedido en la puerta de tu casa.
💵 ¡En compras mayores a Q250 el envío es GRATIS!
📌 Para compras menores a Q250, el costo de envío es de Q25.
⏱️ Tiempo de entrega: de 2 a 4 días hábiles, dependiendo de tu ubicación.

ENVÍO POR FORZA
📦 Enviamos a todo el país por medio de FORZA, para que recibas tus productos de forma rápida y segura.
Puedes pagar el total de tu compra junto con el envío al momento de recibir tu pedido en la puerta de tu casa.
💵 ¡En compras mayores a Q200 el envío es GRATIS!
📌 Para compras menores a Q200, el costo de envío es de Q20.
⏱️ Tiempo de entrega: de 2 a 4 días hábiles, dependiendo de tu ubicación.